|
YaDICs
V04.14.a
Yet another Digital Image Correlation software: platform dedicated to 2/3D Fluid and Solid kinematics field measurements.
|
|
YaDICs
V04.14.a
Yet another Digital Image Correlation software: platform dedicated to 2/3D Fluid and Solid kinematics field measurements.
|
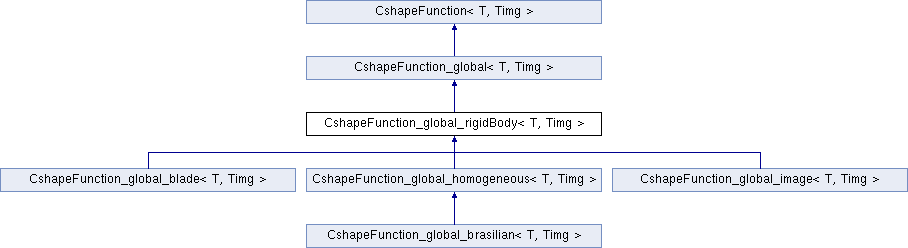
This class implements Rigid Body shape functions available for 2D and 3D cases. It implements 3 rigid body translations called "Tx, Ty, Tz" and 3 rigid body rotations called "Rz,Rx,Ry". Notice that every shape function classes use it. RigidBody modes within the entire set of required modes by user is noted "m_modRB" : More...
#include <CshapeFunction_global_rigidBody.h>
Public Member Functions | |
| virtual void | init (CParameterNetCDF &fp) |
| virtual void | exec (const CImg< Timg > &box, const std::vector< T > &x, CImgList< T > &N) |
| void | set (const std::vector< T > &x, const std::vector< int > &md, const std::vector< int > &rg, CImgList< T > &N) |
| T | shape (const int &dim, const int &range, const std::vector< T > &x) |
Public Attributes | |
| std::vector< int > | m_modRB |
| std::vector< int > | m_range |
 Public Attributes inherited from CshapeFunction< T, Timg > Public Attributes inherited from CshapeFunction< T, Timg > | |
| std::string | class_name |
| std::string | m_type |
| std::string | m_name |
| int | m_dof |
| float | m_pi |
| std::vector< std::string > | m_mods |
| bool | m_verbose |
| const char * | m_paramPath |
| int | _3D |
This class implements Rigid Body shape functions available for 2D and 3D cases. It implements 3 rigid body translations called "Tx, Ty, Tz" and 3 rigid body rotations called "Rz,Rx,Ry". Notice that every shape function classes use it. RigidBody modes within the entire set of required modes by user is noted "m_modRB" :
| [in] | m_modRB | : std::vector<int>. |
|
inlinevirtual |
Be carefull, following test for Rigid Body mods catching required that the mod begin by the letter "T" for displacement and "R" for rotation in parameter file!//
Reimplemented from CshapeFunction_global< T, Timg >.
Reimplemented in CshapeFunction_global_brasilian< T, Timg >, CshapeFunction_global_blade< T, Timg >, CshapeFunction_global_image< T, Timg >, and CshapeFunction_global_homogeneous< T, Timg >.
 1.8.6
1.8.6

